



现有技术中,超声波马达已经是一种较为常见的马达,相比于传统的线圈驱动马达,可以任意控制转动的角度,适合于精确控制转动的场合。然而现有的超声波马达实际应用一直较为受到限制,原因在于其体积一般较大,虽然转动力矩相比传统马达并不弱,然而在实际应用中很难针对不同力矩的需求进行调整,导致超声波马达的应用范围受到限制。
因此,现有技术还有待于改进和发展。三阶微控电机厂家所研发目的在于提供一种超声波加强型马达装置及其实现方法,针对现有技术中的超声波马达提供力矩不足的情况,提供一种任意加强力矩的超声波马达装置和实现方法。本项目可行性高,将超声电机应用范围进一步拓宽,突破常规限制,在行业内具有技术领先性。
一、关键技术:
主要技术内容与技术途径:
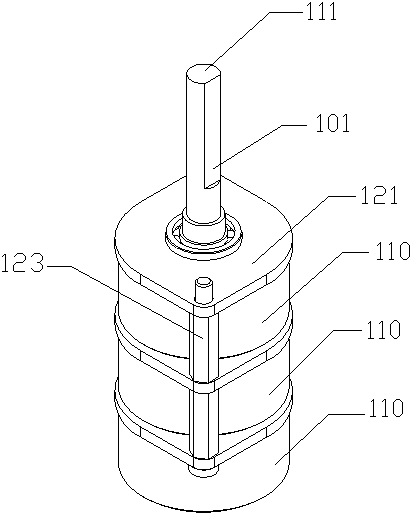
利用两个部分实现超声电机串联结构,这两个部分分别为:对共轴进行驱动,通过共轴对外驱动旋转。
对共轴进行驱动:每一超声波马达单元的定子和转子都设置具有上下贯通的通孔,并由转子连接驱动在通孔中设置的共轴。
每一超声波马达单元的定子设置在一定子座上,所述定子座设置具有一用于装配串联其他超声波马达单元的翼部,并在翼部上设置具有至少两连接孔。转子上的通孔设置为非圆形,并且所述共轴的对应位置设置为对应的截面适配形状,转子上的通孔设置具有一侧平齐的结构。
共轴对外驱动旋转:单元受控对共轴进行驱动,每一个超声波马达连接到统一电源,由驱动电源控制系统控制每一超声波马达单元采用同步驱动。
示意图如下:
上一篇:
微型电机在机器人手指关节的应用




